今回は製造現場で使われるセンサの選び方について説明する記事です。
ワークや機械の位置等、製造現場では様々な物体をセンサで検知して制御に活用する場面が多くあります。
今回の記事では光電センサを方式ごとに分類しながら、特徴と向いているアプリケーションをご紹介していきます。
センサの選定では「以前と同じものを使う」「既設とおなじものを使う」というご担当者様も多いのですが、用途に合ったセンサを選ぶことでトラブルを減らす事が出来ます。
センサの選定に役立てば光栄です。
Contents
今回紹介する内容
今回の記事では、以下の方式の光電センサについて紹介していきます。
【今回紹介するセンサ】
- 透過型
- 回帰反射型
- 拡散反射型
- 距判別型
- 限定反射型
- 色割合判別型
ワークの有無を検出するためのセンサについて、各方式のセンサーの特徴と使い方についてお話していきます。
※LED光源のセンサとして進めます。
透過型
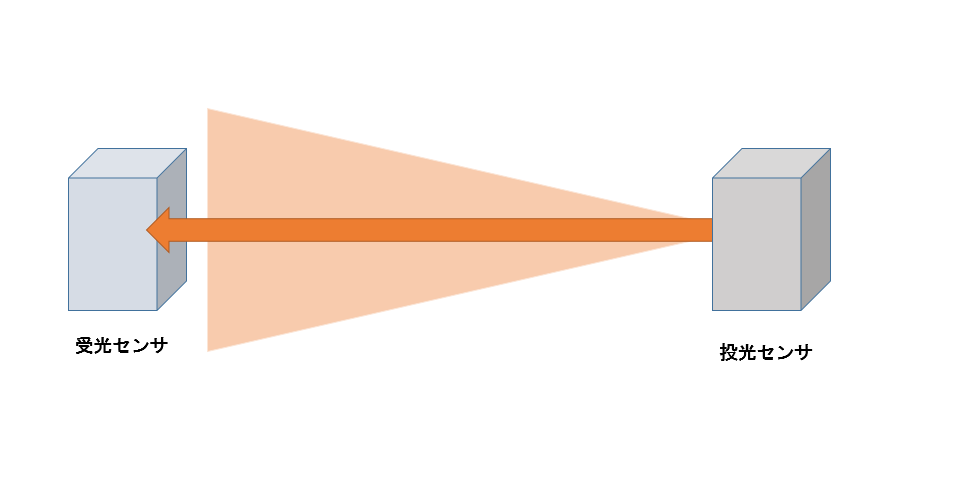
投光センサから出た光を受光センサが検知して、ON/OFFするタイプのセンサーです。
特徴
- 長距離検知向き
- 検出確度が高い
- 回りこみには注意が必要。
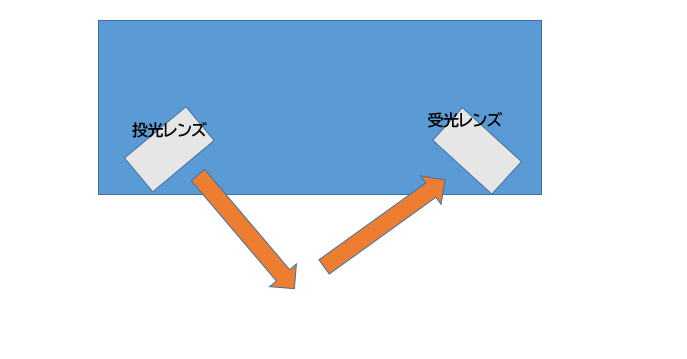
投光センサから受光センサに向かって、一定の角度で広がる光を照射します。
その光を受光センサが受光する事でワークの検出を行います。
受光センサに投光センサの光が届いているか、という基準でワークの有無を検出するため、検出物体の表面状態に影響を受けづらく、検出確度が高いことが特徴です。
また、後述の反射型センサと比べると、投光センサからの光を直接受光センサで受けるので、長距離検出にも向いています。
注意としては投光センサからは一定角度の光が広がって出ていくので、周辺物に反射した光が回り込んで誤検知につながることがあります。
POINT!位置決め精度が高い
センサの光源がLEDの場合、投光センサから一定の角度ので光が出ます。
しかし、受光レンズを通る範囲の光で検出するため、位置決め精度は高かったりします。
【イメージ】
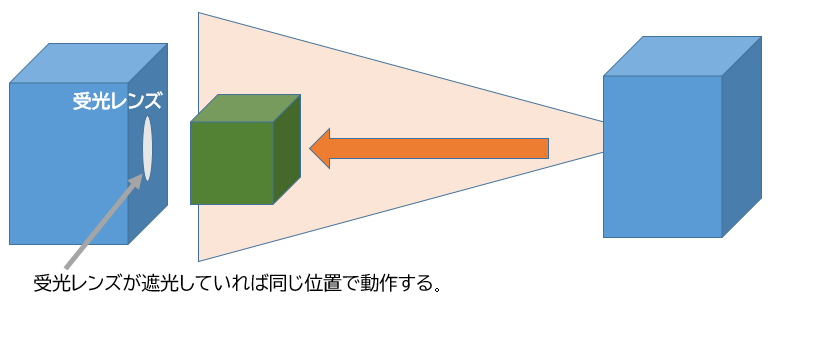
「投光センサからの光が一定の角度で広がる」という部分からの勘違いで「一定の範囲をラフに見るセンサ」と誤解されていることも多いのですが、位置決め精度が高い方式です。
センサのレンズ径が位置決め精度の目安になります。
向いている使い方
透過型の光電センサは次のような使い方に向いているセンサです。
表面状態から反射型での検出が怪しいワークの有無検知
鏡面体や表面形状が複雑でワークからの反射を上手く検出することが難しそうなワークの検出には透過型のセンサを使いましょう。
投光センサの光を受光側から見て遮光できてさえいれば検出できるので、表面状態には影響を受けずに検出出来ます。
位置決め
閾値分、光量が変化したらワークを検出します。
言い方を変えれば受光センサの受光部レンズで、閾値に相当する分の割合が遮光された時に出力が切り替わります。
このことから位置決め用途にも向いています。
回帰反射型
メーカーによって呼び方が分かれる方式です。
「ミラー反射センサ」と呼ばれることもあります。
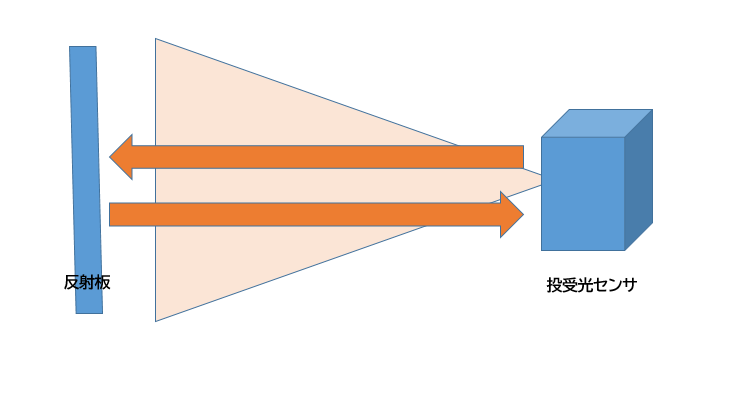
特徴は投受光一体のセンサで、投光部から出た光を反射板に反射させて、戻ってきた光を受光部レンズを通して検知している、という点です。
センサと反射板の間が検出物体によって遮られ、遮光状態になることで検出を行います。
特徴
- 透過型よりも安価
- 透過型より設置が楽
- 透過型よりも位置決め性能は劣る
- 透明体検出に比較的強い
回帰反射のセンサはセンサと反射板の間を遮光できていればON/OFFします。
昔は反射板からの反射なのか、ワークからの反射なのかを誤検知することもありましたが、現在のセンサは各メーカーでさまざまな工夫がされているので、ワーク表面状態による誤検知はかなり減っています。
大手メーカーの製品ならば「ほぼない」と言ってもいい程です。
基本的には透過型と同じように「検出物体が遮ったら検出」という用途で使います。
透過型と比べると、片側が樹脂性の反射板になっている分、低コストで配線の手間も片側がだけで済むというメリットがあります。
ただし、投稿器から出た一定の角度で広がる光を反射板で反射して使うという原理上、どうしても透過型よりも位置決めはラフになり、最小検出物体も大きくなりがちです。
向いている使い方
回帰反射型のセンサは次のような用途に向いています。
低難易度の有無検出でコストを抑えたい時
安価な割に安定して検出出来ることが回帰反射型センサのメリットです。
位置決め精度が求められず、安定検出出来るワークを複数個所で検出しなければならない場合は使いやすいセンサです。
多くのポイントで通過検知や在荷検知を行わなければならない物流システムや製造設備内での用途等では省コスト化の役に立ちます。
透明体検知
回帰反射型の検出原理は透明体検知にも向いています。
センサメーカー各社がラインナップしている透明体検出用センサの多くは、回帰反射型をベースに透明体検出の対策を入れたものです。
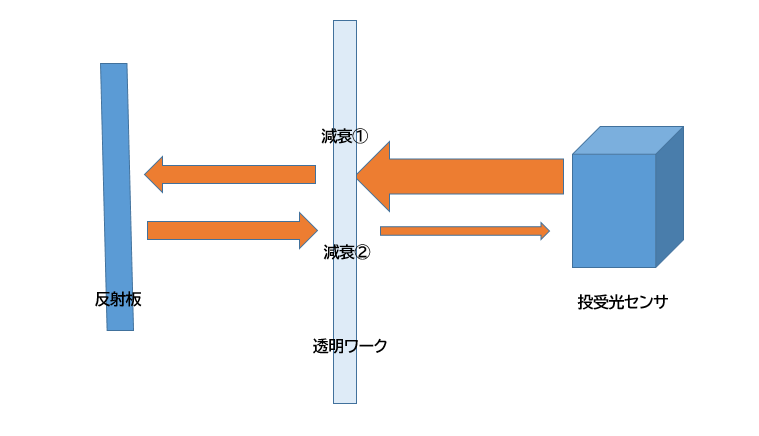
センサから透明体ワークを透過して反射板に到達する時に1回、反射板から透明体ワークを透過してセンサに返って来る時の計2回光が減衰するため透過型センサよりも有無での差が出やすいのです。
ただし、回帰反射の方式だけでは検出能力が足りないことも多く、透明体検出センサでは何かしらの追加処理がされている場合が多いです。
拡散反射型
直接反射型と呼ばれたりもします。
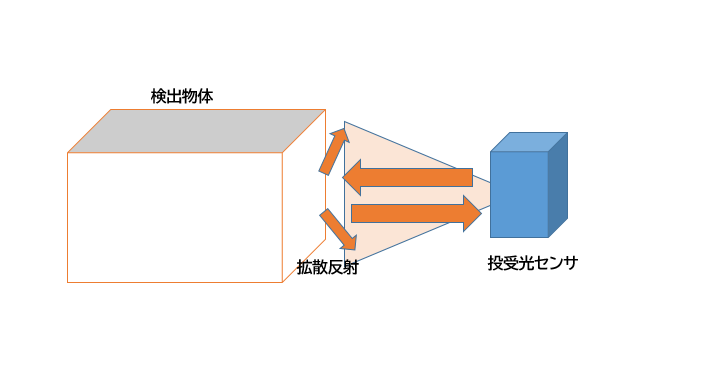
センサからワークに光を当てて、返ってきた光を検出してON/OFFします。
検出物体からの拡散反射を拾うセンサなので拡散反射型と呼びます。
特徴
- 検出が1台で完結するので設置が楽。
- ワークの表面状態に影響を受ける。
- 周辺物の影響を受けやすい。
- 透過型や反射型と比べると検出距離が短い。
検出に使うものがセンサ1台で対面にも何も置かないため、設置と配線は比較的楽です。
検出原理としてセンサ自身が出した光が何かに当たって返って来れば動作します。
したがって、ワーク以外の背景や周辺物に反射した光でも動作してしまったり、ワークに光が当たってもセンサに光が返ってこないと動作しなかったりと、検出確度は透過型、回帰型よりも低くなります。
レーザーセンサの売り文句が「黒ゴムのような低反射の物体も安定検知」なのも、一般的な拡散反射型センサでは、十分な反射が得られずに検知しづらいワークだからです。
また、物体に当てた光の反射を拾うので長距離検出は苦手です。
向いている使い方
拡散反射型のセンサは次のような使い方に向いています。
安定検出が出来るワークの有無検知
設置が簡単なので安定検出出来るワークの有無検知では使いやすいセンサです。
POINT!表面状態を使った検査
「ワークの表面状態の影響を受けやすい」という特徴も上手く使えば検査や判別に使うことが出来ます。
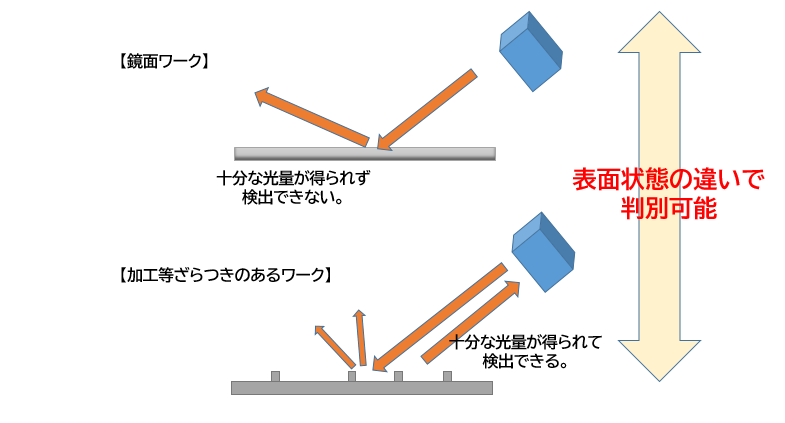
例えば、ワークの表面対してに角度をつけて設置すれば鏡面と鏡面でないものの判別ができます。
鏡面ワークの場合はセンサの光が逃げてしまい、センサには十分な光量が返ってきません。
片面に加工の入ったワッシャの裏表なんかも判別したことはありますが、上手く使えば低コストに品種判別や検査が出来るセンサでもあります。
色を使った判別、検査
ほとんどの拡散反射型センサが赤外光か赤色光なので、赤系の色と青や黒系の色を判別する用途でも使えます。
赤系の光なので、白や赤のワークからは良く反射を得られるからです。
反対に青や黒のワークからは反射が返って来づらいので差を取りやすく判別や検査に使えます。
距離判別型
ワークからの距離を使って検出します。
特徴
- 背景のある検出に向いている。
- ワークの色に影響を受けづらい。
- 細穴内の検出は要注意。
- 拡散反射よりも距離を取りやすい。
1番多そうなのは三角測距型の原理を使ったセンサです。
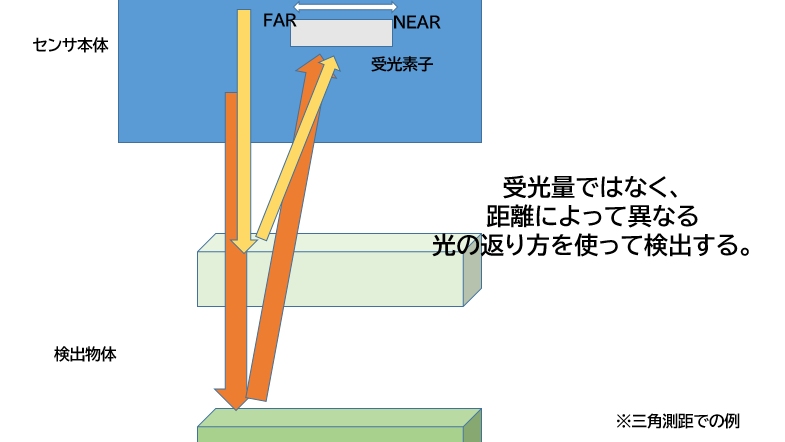
細かい話は置いておきますが、なんらかの方法でワークとセンサの距離を割り出して一定の距離よりもセンサに近ければON/OFFというような閾値の引き方をします。
背景がある状態で手前にあるワークのみを検知することができます。
また、センサからの距離で判別するためワークの色に影響を受けづらいことも特徴です。
ワークから検出に使える程度の光さえ返って来れば、検出ができます。
三角測距という投受光の角度を使って検出するセンサが多いため、細穴の中を検知したり、光が乱反射してしまうワークでは誤検知のリスクがあるので要注意です。
向いている使い方
距離判別型センサは次のような使い方に向いています。
背景のある環境での有無検知
コンベアの上、ステージの上、後ろに稼働する何かがある、などの環境でワークの有無を検知する用途に向いています。
ただし、振動があるとワークとセンサの検出にも影響するため注意が必要です。
細かなワークをワークサイズよりも振幅の大きいコンベア上で見ようとしても誤検知します。
受光量に差が出るワークの検出
品種によって色が異なる等、ラインに流れてくる製品によって光量がバラつく用途での検出に向いています。
そもそも、受光量を使った検出方式ではないので、光量のバラつきに左右されません。
有無検知を使った判別・検査
特定の出っ張りの有無を見て品種判別する、というような使い方も出来ます。
検出部分の高さで判別するため、ワークの一部分だけの有無を見る用途でも使いやすく判別にも応用出来ます。
高さを使った部品有無判別・検査
高さを見ることで「あるはずのものがない」「ないはずのものがある」という検査をすることもできます。
限定反射型
投受光のレンズに角度がついた構造のセンサです。
角度がついていることで「一定の範囲からの反射のみ」を拾います。
特徴
- 反射型で透明体検出が出来る。
- 検出距離が短い。
ワーク表面に角度をつけて反射させるため、透明体を安定して検出出来る数少ない反射型センサです。
ただし、投受光レンズに角度をつけているが故に数mmレベルの短い距離でしか使えません。
向いている使い方
現低反射型センサが向いている使い方は次の通りです。
ガラス基板などの透明板検出
もはや「この用途のためにあるセンサ」といっても過言ではないほどに、各社が紹介している主な使い方です。
私はガラス基板以外にガラス瓶の底面や側面を検知させて使ったこともあります。
一応、細かな部品の通過数カウントで使ったこともありますが、基本的には透明対検出が主な用途になるかと思います。
色割合判別型
ややマイナーなセンサですが、いわゆる「カラーマークセンサ」の中の一方式です。
カラーマークセンサは大きく分けると「光源の色を変えて特定の色からの反射を検出するタイプ」と「白色光を使って検出するタイプ」の2つに分けられます。
色割合判別型は白色光を使うタイプのセンサです。
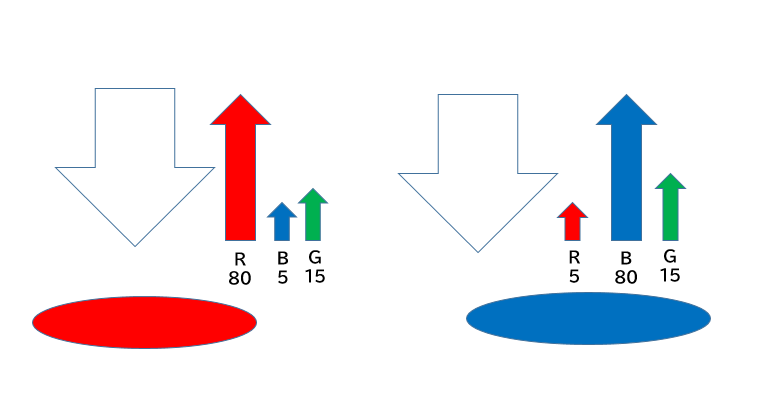
白色の光をワークに当てて、返ってきた光のRGB割合を使って検出します。
特徴
- 特定の色だけ検出できる。
- 拡散反射型よりもバタつきに強い。
- 白と黒の判別は苦手。
返ってきた光の色の比率を見ているので、ワークがバタついてしまう用途でも、結構しっかりと検出が出来ます。
光量で検出する方式では受光量がバラつき不安定になり、距離で検出する場合もセンサとワークの距離が変わるので不安定になる様な条件です。
ただし、白と黒は返ってくる光量差で見れば差は大きいのですが、RGBの比率で見ると似ているので上手く判別しづらいです。
白と黒の判別なら黒判別モードを使うか、光量式の拡散反射センサを使えば判別できます。
向いている使い方
色割合判別型のセンサは次のような使い方です。
カラーマーク検出
印刷物のカラーマークや箱、包装の色を目印に検出します。
「色割合判別型センサがカラーマークセンサのひとつ」といっても過言ではないので、カラーマーク検出には非常に向いています。
シートがバタつくような条件でも上手く検出してくれます。
まずは検出原理を押さえよう。
今回は検出原理ごとに光電センサを紹介しました。
更にLEDセンサなのか、レーザーセンサなのか、ファイバセンサなのかでも使い分けがあります。
ただ、共通して言えることは「原理を知って、理屈で検出可否を考えるべき」という点です。
一度理解すればかなり応用が利きますし、実機で試さなくてもなんとなくのアタリくらいは立てられるようにもなります。
いざという時に役に立つので押さえておきましょう。
では、また。